robotikk

Temaet robotteknologi (også robotteknologi ) omhandler forsøket på å redusere begrepet interaksjon med den fysiske verden til prinsipper for informasjonsteknologi og til en teknisk gjennomførbar kinetikk . Begrepet " robot " beskriver en enhet som kombinerer disse to konseptene ved at den implementerer samspillet med den fysiske verden på grunnlag av sensorer , aktuatorer og informasjonsbehandling. Kjerneområdet for robotikk er utvikling og kontroll av slike roboter. Det inkluderer underområder innen informatikk (spesielt kunstig intelligens ), elektroteknikk og maskinteknikk . Formålet med robotikk er å lage en styrt samarbeid mellom robot elektronikk og robot mekanikk gjennom programmering .
Oppfant begrepet og har formet science fiction -forfatteren Isaac Asimov , nevnte først at han var i novellen Runaround (dt. Prowler) i mars 1942 i magasinet Astounding . I følge Asimovs definisjon refererer robotikk til studiet av roboter eller maskiner.
historie


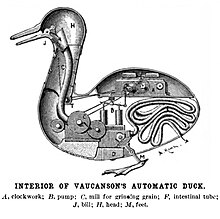
De første testene med automat ble utført i antikken . Kjente inkluderer automatiske teatre og musikkmaskiner, utviklet av Heron of Alexandria . Med nedgangen i gamle kulturer forsvant den vitenskapelige kunnskapen om denne tiden også midlertidig (se Tap av bøker i sen antikk ). Rundt 1205 skrev Al-Jazarī , muslimsk-arabisk ingeniør og forfatter på 1100-tallet, sitt verk om mekaniske enheter, Kitāb fī maʿrifat al-Hiyal al-handasīya "Book of Knowledge of Ingenious Mechanical Devices", også kjent som "Automata "ble kjent i vestlig kultur. I dette verket erklærer han at han skrev det for Ortoqids rike . Han opprettet tidlige humanoide automater og et bånd om programmerbare (tolkbare som robot, håndvaskautomat, automatisk forskyvning av påfugler). Leonardo da Vinci sies å ha blitt påvirket av den klassiske automaten til Al-Jazari. Han er kjent for å ha poster og skisser fra 1400 -tallet som kan tolkes som planer for androider . Nivået på teknisk kunnskap var imidlertid utilstrekkelig for å gjennomføre slike planer. Rundt 1740 designet og bygde Jacques de Vaucanson en fløyte-automat, en automatisk and og den første programmerbare helautomatiske veven. I litteraturen tilskrives sistnevnte fortjeneste ofte Joseph-Marie Jacquard 1805.
På slutten av 1800-tallet ble det gjort forsøk på robotikk i militæret (fjernstyrte båter, torpedokontroller). Forfatteren Jules Verne skrev en historie om en menneskelig maskin . I 1920 introduserte forfatteren Karel Čapek begrepet robot for en android. Etter slutten av andre verdenskrig gjorde robotteknologi raske fremskritt. Avgjørende for dette var oppfinnelsen av transistoren i 1947 ved Bell Laboratories , integrerte kretser og senere utvikling av kraftige og plassbesparende datamaskiner.
Fra rundt 1955 kom de første NC -maskinene på markedet (enheter for styring av maskiner) og i 1954 registrerte George Devol patent på en programmerbar manipulator i USA. Denne datoen anses å være fødselstiden for utviklingen av industrielle roboter . Devol var også en av grunnleggerne av Unimation-selskapet, som introduserte den første hydraulisk opererte industriroboten i 1960. I 1968utviklet MIT den første mobile roboten.
I Tyskland ble robotteknologi bare brukt produktivt fra begynnelsen av 1970 -tallet.
Rundt 1970 ble den første autonome mobilroboten Shakey (den vaklende) også utviklet vedStanford Research Institute .
I 1973 begynte Waseda University Tokyo å utvikle den humanoide roboten Wabot 1 . Samme år bygde den tyske robotpioneren KUKA verdens første industrirobot med seks elektromekanisk drevne akser, kjent som FAMULUS . [1] Et år senere (1974) presenterte svenske ASEA sin fullt elektrisk drevne robot (IRb6).
I 1986 startet Honda Humanoid Robot Research and Development Program . Resultatet var den humanoide robotversjonene P1 til P3. Honda presenterte en videreutvikling i 2004 i form av den humanoide roboten ASIMO .
I 1997 landet den første mobile roboten på Mars ( Sojourner ).
Leketøyindustrien har heller ikke lukket seg for robotikk. Eksempler på slike produkter er Lego Mindstorms , iPitara , Robonova eller robothunden Aibo fra Sony .
Robotikk og etikk
Ifølge futurologer og filosofer krever den stadig økende automatiseringen og digitaliseringen, kombinert med den økende innsamlingen og økende utvekslingen av data (" Big Data ") grunnleggende spørsmål om menneskers rolle i denne prosessen og i disse sammenhengene. Allerede i 1942, z. B. Asimov har en tilsvarende kode , " Robotlovene ". [2]
Robotikk i dag
Robotikk er en vitenskapelig disiplin som omhandler utvikling av roboter. Den mekaniske utformingen, forskriften og den elektroniske kontrollen spiller en vesentlig rolle. Den mekaniske modelleringen av en robot er for det meste basert på metoder for flerkroppssystemer eller flerkroppsdynamikk , mens utformingen av kontrollen for roboter kommer fra automatiseringsteknologi .
I mellomtiden undersøkes alternative teknikker for sykling som et middel til bevegelse i menneskelige omgivelser, for eksempel å gå på seks, fire, to eller til og med ett ben. Mens industriroboter vanligvis utfører manuelle oppgaver eller håndteringsoppgaver i et miljø tilpasset dem, er slike serviceroboter ment å tilby tjenester for og på mennesker. For å gjøre dette må de kunne bevege seg rundt i det menneskelige miljøet og finne frem til det som er gjenstand for vitenskapelig forskning.
Ser ut som et spill, men med noen seriøs vitenskapelig forskning bak, er robotfotballkamper mellom lag som roboter. Målet med forskerne er å utvikle et fotballag bestående av autonome tobeinte roboter innen 2050 som kan konkurrere mot verdensmestrene i fotball.
Industrielle roboter brukes mest i miljøer som er for farlige eller urimelige for mennesker. I dag jobber moderne roboter med dumme samlebånd raskere og mye mer nøyaktig enn mennesker og kan erstatte dem på flere og flere områder ( automatisering ). I dag er biler bygget med stort engasjement av roboter, og selv en moderne mikroprosessor kunne ikke lenger produseres uten en robot. Serviceroboter har blitt brukt en stund for å gjøre hverdagen enklere for mennesker eller for å underholde dem, for eksempel Robosapien . Det er husholdningsroboter som kan støvsuge , tørke gulvet eller klippe plenen . Selv om du bare spesialiserer deg på en enkelt oppgave, kan du utføre den relativt autonomt. Forskningsroboter utforsker blant annet fjerne planeter eller katastrofeområder [3] og trenger gjennom vulkaner eller kloakkrør. AUV -er brukes til et stort utvalg av deteksjonsoppdrag i marin sektor. Det er konsepter og første prototyper for kryoboter og hydroboter som vil bli brukt i romfart i fremtiden. Det er også planer om å bruke roboter til prøveinnhenting og asteroide gruvedrift .
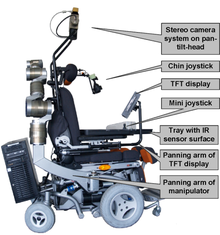
I medisin brukes roboter til undersøkelser, operasjoner og rehabilitering og utfører enkle oppgaver i det daglige sykehuslivet. En prototype for små nanoroboter som kan bevege seg i blodet ble testet på ett øye på ETH Zürich allerede i 2004. De styres av eksterne magnetiske felt. Bistandsroboten FRIEND , som ble utviklet ved Institute for Automation Technology ved University of Bremen, er ment å støtte funksjonshemmede og eldre i hverdagslige aktiviteter (f.eks. Tilberede et måltid) og gjøre dem i stand til å integrere seg igjen i yrkeslivet.
Modulære robotsystemer brukes som fysisk rask prototyping for mobile tjenestroboter , spesielt innen forskning og utvikling. Tilnærmingen til komponentbaserte, åpne grensesnitt til gjenbrukbare maskinvare- og programvaremoduler muliggjør rask og kostnadseffektiv implementering av robotprototyper. Spesielt innen servicrobotikk krever kompleksiteten til de nødvendige oppgavene nye, dynamiske, fleksible og rimelige tilnærminger til utviklingen av tilsvarende robotsystemer. [4]
De første underholdningsrobotene som Sonys robothund Aibo er et skritt mot det elektroniske kjæledyret. I tillegg til Aibo, er det andre robotprodukter fra leke- og underholdningsindustrien som kan programmeres med en datamaskin på et stort sett enkelt språk, for eksempel for å følge en lyskilde eller en linje på gulvet eller for å sortere fargede byggesteiner.
En annen hobby er å bygge roboter selv. Dette kan gjøres ved hjelp av forberedte robotsett eller i henhold til din fantasi. I dette tilfellet må du for eksempel designe et billignende kjøretøy selv, bruke passende sensorer for å bestemme avstanden til målet eller fargen på bakken, og bruke disse måleresultatene til å bestemme en kurs som kjøretøyet skal kjøre. Den faktiske oppgaven er å koble sensordataene til hastigheten og retningen til kjøretøyet. Dette gjøres i en mikrokontroller som må programmeres av deg selv. Den nødvendige elektronikken tilbys i forskjellige design som C-Control eller Arduino . Velkjente, men også veldig forseggjorte modeller er roverne .
For eksempel er mange fascinert av konstruksjonen av "kamproboter" som prøver å ødelegge hverandre eksternt med kampvåpen. Siden disse maskinene er fjernstyrt og ikke har noen egen intelligens å snakke om, er de så langt ikke roboter i ordets egentlige betydning.
Roboter er også et populært emne innen science fiction . Det er menneskelignende roboter der som ofte har kunstig intelligens . Hvis de også er ren fiksjon, former Isaac Asimovs robotlover allerede tankene om roboter.
En ekstra variant av roboten, som allerede er implementert i en veldig enkel form, er cyborg som en sammensmeltning av robotteknologi med menneskelig anatomi . Androider - kunstige menneskelignende vesener - kan være roboter, men roboter trenger ikke nødvendigvis å være androider. En første velutviklet tilnærming er ASIMO- roboten fra Honda.
Roboter for utdanning
Roboter er også et problem i utdanningen. Det er roboter for barneskolen , roboter for ungdomsskolen eller videregående skole (ungdomsskoler), roboter for høyskole og roboter for yrkesopplæring . En spesiell form for roboter for utdanning er rovere, som er utviklet og testet, for eksempel som en del av luftfartsundervisning ved institusjoner i Tyskland . Disse spesialiserte robotene er vanligvis ment som en rover for et bestemt mål eller en konkurranse. På Maker Faire 2016 i Berlin ble en rover ved navn "EntdeckerRover" ER2 [5] presentert, som er egnet for utdanning og fritid og også kan tilpasses de ulike utdanningsområdene. Andre systemer er stort sett i plast fra andre produsenter og prosjekter.
I Tyskland og Østerrike støtter roboter og den spesielle formen for rover for det meste utdanning innen MINT -fag , som er på mange engelsk. STEM -fagene eller STEM -opplæringen (Education) kan også kalles i de talende landene. Så det handler også om promotering av vitenskap og teknologiutdanning eller teknologikunnskap, samt temaene datavitenskap og matematikk . Matematikk er spesielt viktig for sofistikerte robotroboter og rovere, for eksempel innen romfart og luftfart .
Robotikk og militær

Til slutt, selv i militær teknologi, er ubemannede droner eller roboter for å føre krig ikke lenger science fiction, men virkelighet. DARPA , militært forskningsanlegg ved USAs forsvarsdepartement , kunngjorde først en premie på en million amerikanske dollar i Grand Challenge i juni 2004. De ubemannede kjøretøyene til deltakerne bør uavhengig nå et reisemål rundt 280 kilometer unna over Mojave -ørkenen på 10 timer. Selv om det mest vellykkede kjøretøyet bare kjørte rundt 18 kilometer og deretter veltet og gikk opp i flammer, ble premiepengene økt til to millioner amerikanske dollar for neste konkurranse. Da konkurransen ble gjentatt i 2005, hadde fire kjøretøyer allerede krysset målstreken. Det vinnende kjøretøyet nådde en gjennomsnittlig hastighet på nesten 30 km / t.
Robotikk og sikkerhet
Risiko og farer
Sikkerhetsretningslinjer for roboter skyldes det respektive bruksområdet og robottypen. Industrielle roboter er beskyttet av lovlig foreskrevne sikkerhetstiltak som bur, rutenett, lysbarrierer eller andre barrierer. Med økende autonomi krever imidlertid nåværende eller fremtidige, mer komplekse robotsystemer sikkerhetstiltak som er tilpasset omstendighetene. På grunn av det brede spekteret av bruksområder for roboter, er det imidlertid vanskelig å etablere universelle sikkerhetsregler for alle roboter. De "tre (eller fire) robotikkreglene" ( robotlovene ) fastsatt av science fiction -forfatteren Isaac Asimov i romanene hans kan bare forstås som etiske retningslinjer for mulig programmering, siden uforutsigbare situasjoner ikke kan beregnes av roboten. Jo mer autonomt en robot handler i det menneskelige miljøet, desto større er sannsynligheten for at levende vesener eller gjenstander vil bli skadet. Ideen om at roboter kan tilby mennesker beskyttelse er også kontroversiell - ikke minst på grunn av uklarheten i begrepet beskyttelse . Det at ingen absolutte verdier kan programmeres her kan ses parallelt i diskusjonen om spenningen mellom beskyttelse og paternalisme. Dette problemet tas for eksempel opp i filmen I, Robot , der en mann blir reddet av en robot fra en bil som har falt i vannet på grunnlag av en beregnet "overlevelsessannsynlighet", mens et barn drukner i en bil som synker også. En person ville sannsynligvis ha handlet i henhold til etiske og moralske prinsipper i stedet for på grunnlag av en abstrakt sannsynlighet for overlevelse og reddet barnet først.

Gruppen av roboter inkluderer også autonome våpen eller rekognoseringssystemer som smarte bomber , ubemannede droner , vaktroboter eller fremtidige tenkelige autonome kamproboter . Hvis slike farlige maskiner brukes til krigføring, kan spørsmålet om etiske verdier i programmering bli overflødig, og det viser seg at kravet om universelle sikkerhetsmaksimumer for alle bruksområder og robottyper tilsynelatende er en vanskelig oppgave å løse. Hensynet til etiske verdier ved bruk av roboter er heller ikke et problem som menneskeheten bare vil møte i fremtiden. Allerede i andre verdenskrig ble skip senket av torpedoer med et navigasjonssystem , eller bygninger ble ødelagt av V1 cruisemissiler, som takket være deres input, prosessering og utgangsfunksjon tilsvarer definisjonen av en robot. Selv i dag blir mennesker skadet eller drept direkte eller indirekte av komplekse, autonomt opererende maskiner.
I april 2008 ble en serie autonomt fungerende væpnede roboter kalt SWORD trukket ut av tjeneste av det amerikanske forsvarsdepartementet for bruk i Irak -krigen fordi robotarmen hadde rotert i flere hendelser, selv om dette ikke var ment i den respektive situasjonen. Selv om ingen ble skadet i hendelsene, ble robotene klassifisert som usikre og feltoperasjonen ble avbrutt. [6]
Juridiske spørsmål om robotikk
En robot er et teknisk system med et innebygd datasystem ; systemene samhandler med hverandre. Datasystemets oppgave er å kontrollere, regulere eller overvåke det tekniske systemet det er innebygd i (ECJ, 3. juli 2012 - C -128/11 = NJW 2012, 2565).
Et innebygd system består alltid av såkalt innebygd programvare. Uten denne innebygde programvaren ville en robot absolutt ikke vært brukbar, noe som selvfølgelig også gjelder de fleste (intelligente) maskiner fra vaskemaskiner til komplekse produksjonslinjer eller store fly. Allerede før ECJ -avgjørelsen (ECJ, 3. juli 2012 - C -128/11 = NJW 2012, 2565) om videresalg av brukt programvare, fastsatte TRIPS -avtalen og WIPO Copyright Treaty (WCT) at maskinvare med innebygd programvare kunne være fritt handlet mai (Vander, CR 2011, 77 (78-79)). Det er også enighet om at innebygd programvare ikke skal regnes som viktige elementer i en utleie, og at utleie av maskinvare (f.eks. Roboter) som styres av innebygd programvare ikke har en leierett i betydningen i § 69 c Para 3 UrhG må eksplisitt overført, selv om noen forfattere refererer til en sak-til-sak-analyse (Grützmacher i Wandtke / Bullinger, UrhR, 3. utgave 2009, § 69 c marginalnummer 48). Som et resultat kan det derfor opplyses at roboter kan selges og leies ut uten behov for ytterligere rettigheter.
I Tyskland kan patenter beskyttes av Patent Act (PatG), i EU beskytter European Patent Convention (EPC) patenter. PatG definerer et patent i den første seksjonen (seksjoner 1 - 25 PatG). I henhold til § 1 (1) i patentloven, gis det patenter for oppfinnelser innen alle teknologiområder, forutsatt at de er nye, innebærer et oppfinnelsestrinn og er kommersielt anvendelige. I henhold til § 3 (1) i patentloven og art. 54 EPC anses en oppfinnelse som ny hvis den ikke tilhører den siste teknikken. Teknologien inkluderer all kunnskap som er gjort tilgjengelig for publikum ved skriftlig eller muntlig beskrivelse, ved bruk eller på annen måte før dagen som er relevant for prioriteringen av registreringen; se. § 3 Abs. 1 S. 2 PatG. Når det gjelder roboter, må patentsøkeren derfor demonstrere at roboten hans har nye funksjoner som ikke er toppmoderne (f.eks. Roboters evne til å kjøre).
Det må også være en oppfinnelse. Patenterbare oppfinnelser er tekniske doktriner for systematisk handling som fører til en kausalt forutsigbar suksess ved bruk av kontrollerbare naturkrefter uten interponering av intellektuelle aktiviteter (BGH, 27. mars 1969 - X ZB 15/67 = BGHZ 52, 74; NJW 1969, 1713; GRUR 1969, 672). En videre teknisk utvikling av en robot er bare en patenterbar oppfinnelse hvis den ikke resulterer i en åpenbar måte fra teknikkens stand for "den gjennomsnittlige spesialisten som kjenner hele teknikken" (en juridisk fiksjon, ikke en ekte person ), jf. § 4 setning 1 PatG, art. 56 setning 1 EPC. Det vil si at det er mangel på oppfinnsomhet hvis man kan forvente av denne fagmannen at han, basert på teknikkens stand, ville ha kommet med denne løsningen så snart som mulig og med en rimelig innsats , uten å bli oppfinnsom. Innen robotikk kan derfor bare oppfinnelser som representerer et betydelig fremskritt i utviklingen av robotikk patenteres. Dette trenger imidlertid ikke å referere til roboten som helhet, men kan også referere til individuelle komponenter, for eksempel en robotarm eller en driftsmåte for bevegelse.
I tillegg, i henhold til § 5 (1) i patentloven, artikkel 57 EPC, må oppfinnelsen gjelde for ethvert kommersielt område. Det europeiske patentkontoret tolker begrepet industriell anvendelighet bredt og er av sekundær betydning i praksis. Det er tilstrekkelig at oppfinnelsen kan produseres eller på annen måte brukes i et teknisk kommersielt foretak. Det er også irrelevant om man kan "tjene penger" med enheten eller metoden, den eneste avgjørende faktoren er at det påståtte emnet kan brukes utenfor personvernet. De fleste oppfinnelsene innen robotteknologi er rettet mot kommersiell suksess, det være seg for eksempel: B. i opprettelsen av hushjelpere eller roboter for operasjoner. Dette ligger i sakens natur, siden oppfinnelsen av robotteknologi krever enorme investeringer, og disse blir gjenvunnet av investorene med fortjeneste.
Maksimal varighet for et patent er 20 år fra dagen etter at søknaden er sendt i samsvar med § 16 i patentloven og artikkel 63 (1) EPC. I henhold til § 16a PatG, art. 63 Para. 2 b) EPC i. I samsvar med forordning (EØF) nr. 1768/92 kan det imidlertid utstedes et supplerende beskyttelsessertifikat for oppfinnelser som bare kan utnyttes økonomisk etter en kompleks godkjenningsprosess, som deretter forlenger patentperioden med maksimalt fem år. På grunn av de lange utviklingssyklusene innen robotikk, bør dette brukes regelmessig.
I henhold til § 1 (2) og (3) i patentloven og artikkel 52 (2) og (3) EPC, kan ikke vitenskapelige teorier og matematiske metoder som konstruksjonsplaner for en robot beskyttes som et patent. Det samme gjelder design og utseende av en robot, siden estetiske kreasjoner ikke kan beskyttes av patent.
Mishandling av en robot, uansett om den kommer fra drivkraften for autonomi eller annen grunn, gir alltid anledning til en rekke spørsmål om ansvar. Disse kan på den ene side oppstå ved et kontraktbrudd i henhold til § 280 (1) i den tyske borgerlige loven (BGB), på den annen side, erstatningsretten i henhold til § 823 i den tyske borgerlige loven (BGB) ) overfor tredjeparter eller fra produktansvarsloven. Hvis en robot jobber for en annen kontraherende part innenfor rammen av et kontraktsforhold (f.eks. Utleie) og roboten forårsaker skade på denne parten, utgjør dette absolutt pliktbrudd i. S. v. 280 BGB. En sak som ble kjent av mediene er bruken av ROBODOC fra Integrated Surgical System, som har ført til mange erstatningskrav (BGH, 13. juni 2006 - VI ZR 323/04 = BGHZ 168, 103; NJW 2006, 2477).
I henhold til § 249 S. 1 BGB må skyldneren som er forpliktet til å betale erstatning, gjenopprette situasjonen som ville eksistere hvis omstendigheten som var obligatorisk til å kompensere ikke hadde oppstått. Den skadende parten bør ved dette gjøre erstatning for alle skader som har oppstått som følge av resultatet som er obligatorisk for utskiftning (såkalt totalreparasjon). I tillegg til regelen om totalreparasjon, kommer et ytterligere prinsipp om skadelov til uttrykk i § 249 setning 1 BGB, nemlig prinsippet om produksjon eller erstatning i naturalier (såkalt naturalrestitusjon). I dette tilfellet skal den skadende parten skape situasjonen i kontanter som ville eksistert uten den skadelige hendelsen.
Et spørsmål som sikkert vil bli mer og mer viktig i fremtiden vil være hvem som er ansvarlig for beslutningen som tas av en robot basert på kunstig intelligens (AI). Så det er absolutt forsvarlig at den som bruker robotene må være ansvarlig, ettersom han er ansvarlig for trafikksikkerheten til roboten som brukes og må ta passende sikkerhetstiltak. I et kontraktsforhold kommer disse sikkert fra den generelle omsorgsplikten for kontraktsforholdet, jf. § 280 paragraf 1 BGB, mot tredjeparter sikkert fra erstatningsretten, §§ 823 ff BGB. I prinsippet kan produsenten være ansvarlig i henhold til Product Liability Act (ProdHaftG). Forutsetningen for produktansvar er, i henhold til avsnitt 1, avsnitt 1, setning 1. ProdHaftG, at det var en feil i tingen som forårsaket skaden (dvs. i roboten). En slik feil kan muligens eksistere hvis produsenten ikke innlemmet egnede sikkerhetstiltak i programmeringen av robotprogramvaren. Uansett er produsenten ikke ansvarlig hvis roboten ikke viste feilen som forårsaket skaden på det tidspunktet den ble markedsført (Palandt Sprau -kommentar til BGB 69. utgave 2009 § 1 ProdHaftG marginnummer 17). og hvis feilen ikke kunne oppdages i henhold til den siste teknikken innen vitenskap og teknologi på det tidspunktet produsenten brakte produktet i omløp, se avsnitt 1, avsnitt 2, nr. 5 i ProdHaftG. Likevel må produsenten av roboter bygge sikkerhetstiltak inn i en robot (og spesielt i programvaren) slik at ingen skader kan oppstå, selv etter en AI -læringsprosess. I science fiction -litteraturen z. For eksempel utviklet Isaac Asimov de tre lovene for robotikk (Asimov All Robotic Stories 3rd Edition 2011, Short Story Drummers (English Runaround) s. 276–295). Det er ennå ikke mulig å bedømme om slike ganske filosofiske lover er tilstrekkelige, men det som er sikkert er at produsenten og utvikleren av roboter har en tilsvarende plikt til å sikre trafikksikkerhet. Vedlikeholdet av disse trafikksikkerhetsforpliktelsene gjelder da ikke lenger produsenten, men innehaveren eller eieren av roboten. Prinsippene for håndtering av farlige ting gjelder her. Som en farlig ting z. B. sett et motorkjøretøy som utgjør en viss operasjonell risiko. Produsenten produserer en bil som oppfyller de relevante kravene for kjøretøyregistrering, mens eieren må sørge for at kjøretøyet alltid er i kjørbar stand (BGH, 14. oktober 1997 - VI ZR 404/96 = NJW 1998, 311). Dette gjelder spesielt en garanti til tredjeparter (BGH, 24. april 1979 - VI ZR 73/78 = NJW 1979, 2309). Det samme bør også gjelde for produksjon og bruk av roboter.
Produsenten er ikke ansvarlig for utviklingsfeil (avsnitt 1, avsnitt 2, nr. 5 i produktansvarsloven). Imidlertid er en utviklingsfeil bare tilstede hvis den ikke kunne oppdages på det tidspunktet produsenten satte roboten på markedet i henhold til den nyeste teknikken innen vitenskap og teknologi (Palandt Sprau -kommentar til BGB 69. utgave 2009 § 1 ProdHaftG Rn 21). Ansvarsfraskrivelsen gjelder bare konstruksjonsfeil, men ikke produksjonsfeil (BGH, 9. mai 1995 - VI ZR 158/94 = BGHZ 129, 353; NJW 1995, 2162). Feilen er ikke gjenkjennelig hvis den potensielle faren for roboten i henhold til summen av kunnskap og teknologi som er generelt anerkjent og tilgjengelig, ikke bare i den relevante bransjen og nasjonalt, og ikke kan gjenkjennes av noen fordi disse kunnskapsmulighetene ikke har ennå blitt anerkjent var tilgjengelig (Palandt Sprau -kommentar til BGB 69. utgave 2009 § 1 ProdHaftG Rn. 21.).
Ansvar for skade på gjenstander er i produktansvarsloven begrenset til andre varer enn det defekte produktet, som var beregnet på privat bruk eller forbruk og hovedsakelig ble brukt til dette formålet av skadelidte (Palandt / Sprau -kommentar til BGB 69. utgave 2009 § 1 ProdHaftG Rn 7.). Diese Formulierung schließt ua Schäden an Erzeugnissen im Rahmen einer geschäftlichen Tätigkeit aus (Eisenberg/Gildeggen/Reuter/Willburger: Produkthaftung. 1. Auflage. München 2008, § 1 Rn. 5.).
Eine wichtige Haftungsvoraussetzung ist in § 1 Abs. 2 Nr. 1 ProdHaftG geregelt. Danach ist die Haftung des Produzenten für den Fall ausgeschlossen, dass er das Produkt nicht in den Verkehr gebracht hat. Der Hersteller und auch der Quasihersteller, bringen ein Produkt in Verkehr, sobald er sich willentlich der tatsächlichen Herrschaftsgewalt über das Produkt begibt, z. B. dadurch dass er es ausliefert, in den Vertrieb, in die Verteilerkette oder in den Wirtschaftskreislauf gibt (EuGH, 9. Februar 2006 - C-127/04 = Slg. 2006, I-1313; NJW 2006, 825; EuZW 2006, 184; NZV 2006, 243). Schwierig wird sicherlich die Frage der Abgrenzung der Haftung zwischen dem Hersteller eines Roboters und dem Verwenders eines Roboters, insbesondere dann, wenn sich der Roboter und seine Embedded Software durch KI-Prozesse autonom weiterentwickelt haben. Zur Absicherung des Geschädigten könnte man dann auf den Gedanken kommen, dass Hersteller und Verwender des Roboters als Gesamtschuldner haften.
Unfälle
Die meisten Unfälle mit Robotern entstehen während der Wartung oder Programmierung des Roboters, nicht etwa im geregelten Betrieb. Am 21. Juli 1984 wurde in Michigan , USA, der erste Mensch von einem Industrieroboter getötet. Der Roboter bewegte Werkstücke einer Druckgussmaschine. Der 34 Jahre alte Fabrikarbeiter hatte bereits 15 Jahre Arbeitserfahrung im Druckgießen und erst drei Wochen vor dem Unfall eine einwöchige Roboterschulung abgeschlossen. Er wurde zwischen der vermeintlich sicheren Rückseite des Roboters und einem Stahlpfosten zu Tode gedrückt, als er gegen jede Warnung in den Gefahrenbereich des Roboters kletterte, um verstreute Produktionsreste zu entfernen. Das amerikanische National Institute for Occupational Safety and Health (NIOSH) bietet Richtlinien für Roboterkonstruktion, Training und Anleitung der Mitarbeiter an.
Robotik in der Kultur
Roboter-Wettbewerbe
Programme für Kinder, Jugendliche und Studenten
In vielen Ländern haben Kinder, Jugendliche und Studenten Gelegenheit, an Robotik-Programmen teilzunehmen. Sie bilden Teams, von denen jedes vor der Aufgabe steht, einen mit Motoren und Sensoren ausgestatteten Roboter so zu programmieren, dass er auf einem Spielfeld in einem bestimmten Zeitrahmen autonom oder per Fernsteuerung vorgegebene Aufgaben lösen kann, zum Beispiel Objekte zu sortieren und an bestimmte Orte zu bringen. In einem Teil der Programme umfasst die Aufgabe auch den Entwurf und Bau des Roboters (Freistil); in anderen kommen vorgefertigte Roboter zum Einsatz. Die Teamarbeit mündet in Wettbewerbe, von denen viele auf internationalem Niveau durchgeführt werden.
| Wettbewerb | Robotertyp | Kontrolle | Kontrollsystem | Programmiersprachen | Spielfeldgröße | Zahl der Teams im Spielfeld | Altersgruppe | Zahl der Teams | Ursprungsland | |
|---|---|---|---|---|---|---|---|---|---|---|
| FIRST | First Lego League | Freistil (ausschließlich Lego ); Standardbausatz existiert, Verwendung ist aber optional | 150 Sekunden autonom | Steuerung mit Lego Mindstorms Controller | Lego Mindstorms RCX, NXT, EV3 oder RoboLab | 2,36 × 1,14 m | 2 Teams gleichzeitig | 9–16 Jahre | 21.200+ weltweit (2018/2019) |
|
| First Tech Challenge | Freistil; Standardbausatz existiert, Verwendung ist aber optional | 30 Sekunden autonom, 120 Sekunden ferngesteuert | Fernsteuerung mit Android -Telefonen | Blocks, Java | 3,66 × 3,66 m | 2:2 | 12–18 Jahre | 7.010 weltweit (2018/2019) | ||
| VEX Robotics Competition | Freistil (ausschließlich VEX-Bausatz) | 15 Sekunden autonom, 105 Sekunden ferngesteuert | Fernsteuerung mit VEX-eigenem System | Blocks, C++ , Modkit (VEX-eigene Programmiersprache) | 3,66 × 3,66 m | 2:2 | 5–22 Jahre | ca. 20.000 weltweit (2018) |
|
|
| World Robot Olympiad | Regular Category | Freistil (ausschließlich Lego ) | 120 Sekunden autonom | Steuerung mit Lego Mindstorms NXT oder Lego Mindstorms EV3 | keine Vorgaben | 2,36 × 1,14 m | 1 | 6-12 Jahre 8-12 Jahre 13-15 Jahre 16-19 Jahre |
ca. 26.000 weltweit (2018) |
|
| Open Category | Freistil | autonom | keine Vorgaben | keine Vorgaben | - | - | 8-12 Jahre 13-15 Jahre 16-19 Jahre |
|||
| Football Category | Freistil (ausschließlich Lego ) | 2 × 4 min autonom (Starter) 2 × 5 min autonom |
Steuerung mit Lego Mindstorms NXT oder Lego Mindstorms EV3 | keine Vorgaben | 2,36 × 1,14 m (Starter) 2,43 × 1,82 m |
1:1 | 8-15 Jahre (Starter) 8-19 Jahre |
|||


- Weitere Wettbewerbe
- Carolo-Cup
- Deutscher RoboCupJunior
- Eurobot
- Field Robot Event
- Field Robot Junior
- Micromouse
- Robotchallenge in Wien
- Robo-One
- Robochallenge
- RoboCup
- Robodrome
- RoboGames
- RoboKing
- RobotLiga in Kaiserslautern
- Student Robotics in Southampton, Großbritannien
Programme für Industrie und Forschung
- ELROB
- Google Lunar X-Prize
- Grand Challenge (nach 2007 eingestellt)
- SAUC-E
Studium
Das Hochschulstudium Robotik als Bachelor und Master wird mittlerweile an einigen Hochschulen angeboten. Die Studieninhalte sind meistens folgende: [7] [8]
- Mathematik
- Grundlagen der Elektrotechnik
- Technische Mechanik
- Grundlagen der Informatik
- Elektronische Bauelemente und Schaltungstechnik
- Elektrische Messtechnik
- Digitaltechnik
- Mikrocomputertechnik
- Elektrische Antriebe
- Signale und Systeme
- Grundlagen der Steuerungs- und Regelungstechnik
- Stromrichtertechnik
- Kinematik und Steuerung von Robotern
- Bildverarbeitung
- Motion Control
- Hardware- und Softwareentwurf in der Automatisierungstechnik
- Simulationstechniken
- Auslegung mechatronischer Systeme
- Leittechnik und industrielle Bussysteme
- Technik von CNC-gesteuerten Werkzeugmaschinen
- Roboterprogrammierung
- Mobile Roboter, Autonome Systeme und Robot Vision
- Faserverbund- und Sonderwerkstoffe
- Optische Sensorik, Computer Vision
- Getriebetechnik
- Embedded Systems
Wissenschaftspreise in der Robotik
- Georges Giralt PhD Award
- euRobotics Technology Transfer Award [9]
Forschungseinrichtungen
Forschungseinrichtungen im deutschsprachigen Raum sind unter anderem (in alphabetischer Reihenfolge):
- Arbeitsgruppe Robotik des Fachbereich Mathematik und Informatik an der Universität Bremen
- Fachgebiet Navigation und Robotik an der Charité - Universitätsmedizin Berlin
- Forschungsgruppe Robotik des Deutschen Forschungszentrums für Künstliche Intelligenz in Bremen
- Forschungsabteilung Kognitive Mobile Systeme [10] am Fraunhofer-Institut für Kommunikation, Informationsverarbeitung und Ergonomie FKIE, Fraunhofer-Gesellschaft , Wachtberg , früher FGAN
- Forschungsfeld Robotik der Technischen Hochschule Georg Agricola in Bochum
- Forschungsgruppe Wissensbasierte Systeme im Fachbereich Mathematik und Informatik der Universität Osnabrück
- Fraunhofer-Institut für Fabrikbetrieb und -automatisierung , Fraunhofer-Gesellschaft , Magdeburg
- Fraunhofer-Institut für Intelligente Analyse- und Informationssysteme , Fraunhofer-Gesellschaft , Sankt Augustin
- Fraunhofer-Institut für Produktionstechnik und Automatisierung , Fraunhofer-Gesellschaft , Stuttgart
- Labor für Neurorobotik am Institut für Informatik der Humboldt-Universität zu Berlin (HU) [11]
- Lehr- und Forschungsgebiet Autonome Systeme im Fachbereich Informatik und Kommunikation der Westfälischen Hochschule Gelsenkirchen [12]
- Lehrstuhl Autonome Intelligente Systeme der Uni Freiburg [13]
- Lehrstuhl für Industrielle Robotik und Produktionsautomatisierung, Technische Universität Dortmund
- Fachgebiet Intelligente Autonome Systeme, Technische Universität Darmstadt [14]
- Lehrstuhl für kognitive Robotik am Institut für Informatik der Humboldt-Universität zu Berlin (HU)
- Lehrstuhl für Robotik und Eingebettete Systeme [15] an der Universität Bayreuth
- Lehrstuhl Robotics and Embedded Systems der TU München [16]
- Institut für Anthropomatik und Robotik am Karlsruher Institut für Technologie
- Institut für Automatisierungstechnik an der Universität Bremen
- Institut für Flugsystemtechnik, Abt. Unbemannte Luftfahrzeuge [17] , DLR Braunschweig
- Institut für Getriebetechnik und Maschinendynamik an der RWTH Aachen [18]
- Institut für Mechatronische Systeme an der Leibniz Universität Hannover [19]
- Institut für Roboterforschung , Technische Universität Dortmund
- Institut für Robotik und kognitive Systeme an der Universität zu Lübeck
- Institut für Robotik und Prozessinformatik an der TU Braunschweig
- Institut für Robotik [20] an der Johannes Kepler Universität Linz
- Mechatronik/Robotik an der Fachhochschule Technikum Wien
- Research Institute for Cognition and Robotics − CoR-Lab an der Universität Bielefeld
- Institut für Robotik und Mechatronik im Robotik und Mechatronik Zentrum des DLR Oberpfaffenhofen
- Arbeitsgruppe für Robotersysteme [21] an der Technischen Universität Kaiserslautern
Rezeption
- Ausstellung Hello Robot , Vitra Design Museum , Weil am Rhein , bis 14. Mai 2017. [22]
Siehe auch
- Biomechatronik , Mechatronik
- Humanoider , Industrie- , Laufroboter
- Kognitive Systeme
- Künstliches Leben
- Robot Hall of Fame
- Roboterethik , Roboterkalibrierung
- Robotic Governance
Literatur
- Bruno Siciliano, Oussama Khatib: Springer Handbook of Robotics . Springer-Verlag, Berlin 2008, ISBN 978-3-540-23957-4 .
- George Bekey, Robert Ambrose, Vijay Kumar: Robotics: State of the Art and Future Challenges . World Scientific Pub, London 2008, ISBN 978-1-84816-006-4 .
- John J. Craig: Introduction to Robotics – Mechanics and Control . Prentice Hall International, Upper Saddle River 2005, ISBN 0-201-54361-3 .
- Alois Knoll, Thomas Christaller: Robotik: Autonome Agenten. Künstliche Intelligenz. Sensorik. Embodiment. Maschinelles Lernen. Serviceroboter. Roboter in der Medizin. Navigationssysteme. Neuronale Netze. RoboCup. Architekturen . Fischer (Tb.), Frankfurt, Frankfurt am Main 2003, ISBN 978-3-596-15552-1 .
- Heinz W. Katzenmeier: Grundlagen der Robotertechnik: Tipps und Tricks für den Selbstbau . Elektor-Verlag, Aachen 2004, ISBN 978-3-89576-147-8 .
- Thomas Söbbing: Rechtsfragen in der Robotik – „Rechtlich gesehen: Der Roboter als Softwaregesteuerte Maschine“. In: Innovations- und Technikrecht. (InTeR) 2013, ISSN 2195-5743 , S. 43–51.
- Alex Ellery: An introduction to space robotics . Springer; Praxis Pub, London / New york / Chichester 2000, ISBN 1-85233-164-X .
- Roland Schulé: Experimente zur Robotik. Modelle bauen und programmieren. Franzis-Verlag, 1988. ISBN 3-7723-9461-2
Weblinks
- International Federation of Robotics (IFR)
- Welt-Roboterstatistik der International Federation of Robotics (IFR)
- VDMA Robotik + Automation (Wirtschaftsverband)
- Videos von roteg-robotertechnik Anwendungsbeispiele der Robotik in Unternehmen
- Telerobotics bei den Technology Demonstration Missions der NASA
Einzelnachweise
- ↑ Die KUKA Geschichte. KUKA AG, abgerufen am 21. November 2018 (Abschnitt KUKA schreibt Geschichte als Robotik-Pionier ).
- ↑ Eva Wolfangel : Wie weit liefern sich Menschen den Computern aus? In: badische-zeitung.de , Computer & Medien , 18. Februar 2017.
- ↑ Center for Robot-Assisted Search and Rescue crasar.org
- ↑ Publications about the VolksBot and its sensors physical rapid prototyping System Volksbot
- ↑ eR2.IoT (@eR2_IoT) | Twitter. In: twitter.com. Abgerufen am 10. Oktober 2016 .
- ↑ Wired.com: Killer Ground 'Bots Out of Iraq: How Come? Englisch, Abgerufen am 21. April 2008
- ↑ Robotik Studium. Abgerufen am 22. Mai 2021 .
- ↑ Robotik - Wilhelm Büchner Hochschule. Abgerufen am 22. Mai 2021 .
- ↑ https://eu-robotics.net/cms/index.php?idcat=170&idart=3553
- ↑ Forschungsabteilung Kognitive Mobile Systeme am Fraunhofer-Institut für Kommunikation, Informationsverarbeitung und Ergonomie (FKIE)
- ↑ http://www.neurorobotik.de/
- ↑ http://homepage.informatik.w-hs.de/HSurmann/
- ↑ Autonome Intelligente Systeme
- ↑ Intelligente Autonome Systeme
- ↑ Robotik und Eingebettete Systeme
- ↑ Robotics and Embedded Systems
- ↑ Autonomous Rotorcraft Testbed for Intelligent Systems - ARTIS
- ↑ http://www.igm.rwth-aachen.de/
- ↑ Institut für Mechatronische Systeme
- ↑ Institut für Robotik, Johannes Kepler Universität Linz
- ↑ RRLAB
- ↑ Michael Baas: Vitra Design Museum beleuchtet das Verhältnis von Mensch und Maschine. In: badische-zeitung.de , Kunst , 16. Februar 2017.
- Robotik