Satellittlaser


Satellite Laser Ranging (SLR; tysk som: satellittlaseravstand) er en svært presis metode for Satellitengeodäsie , der avstanden mellom en bakkestasjon og en satellitt måles ved hjelp av transittiden til en laserpuls. Dette er en toveis målemetode.
Satellitt laser-avstandsmåle er brukt på den ene side nøyaktig å bestemme den bane av geodetiske satellitter, og på den annen side for å bestemme punkter i jordmålinger og geodynamikk . Fra dette kan endringer i jordens kropp og jordens rotasjon utledes - sammen med andre metoder for høyere geodesi .
Begrunnelse
En kort laserpuls genereres i senderen til bakkestasjonen og sendes til satellitten via et optisk system. Samtidig startes en elektronisk tidsintervallteller. Pulsen som reflekteres av satellitten registreres, forsterkes, analyseres og mates til telleren som en stopppuls via mottakende optikk i mottaksanordningen til bakkestasjonen.
Kjøretiden Δt for laserpulsen og forplantningshastigheten er resultatet av det registrerte tidsintervallet avstanden d med:


De viktigste komponentene i avstandsmålesystemet på bakken er følgelig:
- Generator og sender av laserimpulsene inkludert optisk system og feste
- Returpulsdetektor og analysator inkludert mottaksanlegg
- Tidsmåler for å bestemme kjøretiden
For å kontrollere og overvåke systemet og definere observasjonsepokene kreves ytterligere undersystemer ( datamaskiner , atomklokker ).
Som et romsegment kreves satellitter med passende reflektorer.
historie
Utviklingen av pulserende lasere for sporing av satellitter begynte i USA allerede i 1961/62 som en del av American Explorer -programmet. I 1964 ble den første satellitten utstyrt med laserreflektorer (BEACON - Explorer - B (BE - B) = Explorer 22). Dette ble brakt inn i en bane i 1000 km høyde og en stigning på 80 ° 9. oktober 1964. De første laseravstandsmålingene ble utført i 1965 med en nøyaktighet på noen få meter. Explorer 27 (= BE-C) og de to GEOS- satellittene Explorer 29 og Explorer 36 var også utstyrt med laserreflektorer. [1]
Det var bare GEOS -satellittene som kunne brukes til satellittgeodesi : på den ene siden kunne satellittbanene bare beregnes utilstrekkelig på forhånd, på den annen side var intervalltellerne for tidsmåling ennå ikke presise nok og antall reflektert lys kvanta var for lav for høye satellitter. Lavere baner betyr at satellitten beveger seg for raskt over himmelen (bare noen få minutter går) og at banen ikke er stabil nok til en pålitelig efemeri . Gjennombruddet kom med forbedret kontroll og laserteknologi , kombinert med en nøyaktig definert og programmert porttid for mottakerteleskopet.
Det ble gjort veldig raske fremskritt i årene som fulgte. Nøyaktigheten nådde omtrent en meter på midten av 1970-tallet, i dag (2015) er den i millimeterområdet, slik at formen på satellitten allerede spiller en stor rolle. Hvis laserekkoet er sterkt nok, måler apparatet bare det første av de returnerende fotonene. Under observasjoner på dagtid - som har vært mulig siden rundt 1995 - analyseres også et større antall reflekser.
Laseravstandsmålesystemer for satellitter er utviklet og installert mange steder i verden. Ofte var dette interne utviklinger i arbeidsgrupper ved observatorier. I 1986 var rundt 50 høytytende systemer i bruk rundt om i verden.
Klassifisering av lasersystemer
Den oppnåelige avstandsmålingens nøyaktighet er nært knyttet til laserpulsernes varighet og oppløsning .
- Følgende gjelder: 1 nanosekund (ns) = 15 cm
Det er vanlig å dele lasersystemene som brukes i grupper (generasjoner) avhengig av konsept og ytelse, hvorved overgangene er flytende.
- Generasjon: En pulsvarighet på 10 til 40 ns tilsvarer en avstandsmålingens nøyaktighet på 1,5 til 6 m; for det meste rubinlasere
- Generasjon: Forkortelse av pulsvarigheten til 2–5 ns, tilsvarende 30–120 cm
- Generasjon: En pulsvarighet i subnanosekundområdet på 0,1 til 0,2 ns, tilsvarende 1,5–3 cm; ofte Nd: YAG laser
Med økningen i nøyaktigheten til målesystemene oppstår ytterligere anvendelsesområder. Satellittbaner kan bestemmes mer presist og bidrag til geodynamiske problemer (f.eks. Skorpebevegelser ) kan gjøres, spesielt med måling av nøyaktigheter på 1-3 cm.
Lysglimtene fra bakken har en kort effekt i området gigawatt . Derfor må observasjonsaktiviteten diskuteres nøyaktig med flytrafikkontroll . I tillegg er det en automatisk utkobling hvis et fly kommer nær bjelken.
Lasermålesystemer og komponenter
Laseroscillatorer
Hjertet i et laseravstandsmålesystem er selve laseroscillatoren . Det kunstige ordet LASER (Light Amplification by Stimulated Emission of Radiation) beskriver ordninger for koherent forsterkning av elektromagnetiske svingninger i (optisk) spektralområdet gjennom stimulert emisjon .
I satellittgeodesi, i tillegg til koherensen , dvs. det faste faseforholdet mellom de enkelte delstrålene, brukes ytterligere to egenskaper ved laserstrålingen, nemlig høy fokusskarphet og høy energitetthet . På denne måten er det mulig å transportere ekstremt korte pulser med høy energitetthet over store avstander.
I satellittgeodesi har to typer lasere funnet utbredt bruk, rubinlaser og neodym-YAG (= yttrium-aluminium-granat) laser . Systemene til 1. og 2. generasjon er nesten utelukkende utstyrt med rubinlasere, de i 3. generasjon stort sett med Nd: YAG -lasere.
Ytterligere systemkomponenter
(a) Monter
For å kunne måle avstanden til variable mål, må lasersenderdelen settes opp slik at den kan flyttes. Dette kan gjøres på et feste som er justerbart i asimut og høyde. Det anbefales å installere mottakeren på samme feste.
Med enheter av 1. generasjon er det vanlig å feste laseroscillatoren til festet, laserene i 3. generasjon er veldig følsomme og må installeres i et klimatisert, støvfritt miljø. Med stasjonære lasere brukes et eget rom ( rent rom ) til dette. Laserpulsene ledes inn i sendeteleskopet via optiske ledere. Monteringen må justeres med målet i bevegelse med tilstrekkelig nøyaktighet slik at laserpulsen treffer satellitten. Hvis kravene til nøyaktighet er lavere (1. generasjon), kan sporing utføres manuelt ved hjelp av en visuell kontroll. Når det gjelder lasere av 3. generasjon, som også fungerer i dagtid, skjer sporing automatisk på grunnlag av forhåndsberegnet satellitt efemeri.
(b) lysmottaker
Laserpulsens energi per arealenhet avtar på vei til satellitten og tilbake med kvadratet på avstanden. Videre svekkes signalet av jordens atmosfære . Til tross for den meget høye utgangsenergien og den sterke buntingen, blir det derfor veldig lite energi returnert, slik at det kreves en meget kraftig mottaker for større satellittavstander.
Mottakerdelen består av et optisk system og en elektronisk lysmottaker. Som optiske systemer kommer reflektorteleskoper eller teleskoper i betraktning, som fokuserer fotonene til den reflekterte laserpulsen på lysmottakeren. På grunn av det større blenderforholdet foretrekkes reflektorteleskoper med stor blenderåpning , spesielt siden måling av svake lysstyrker og ikke geometrisk kvalitet er viktig. For å unngå forstyrrende lys, brukes et filter med en smal båndbredde (Δλ ~ 1 nm) for laserlysets frekvensområde .
Fotodetektorer med svært kort stigningstid som fotomultiplikator (PMT), mikrokanalplatefotomultiplikator (MCP-PMT) eller skredfotodioder (APD) brukes som elektroniske lysmottakere . For å redusere forstyrrende signaler , aktiveres fotodetektoren bare for en kort, forhåndsberegnet tidsperiode på Δt fra 1 til 10 mikrosekunder ( mikrosekunder ). Stigningstiden bør ikke overstige 100 til 300 ps ( pikosekunder ).
(c) pulsanalyse
Signalet som sendes tilbake deformeres på grunn av mange forstyrrelser. Årsaker er blant annet atmosfæriske forstyrrelser, overlagring ved refleksjon fra flere reflektorer, relativ bevegelse av senderen og reflektoren. Omhyggelig pulsanalyse er nødvendig for å bestemme sentrum av pulsen. Flere metoder er mulige. Etablering av tyngdepunktet ved å måle området under signalkurven har vist seg.
Hvis du arbeider på basis av enkeltfotoner (f.eks. Lunar Laser Ranging , LLR), er ikke pulsanalyse nødvendig. Det må da brukes metoder som gjør at individuelle fotoner kan gjenkjennes og behandles.
(d) tidsgrunnlag
Elektroniske tellere med en oppløsning på 10 ps brukes til å måle transittiden . Tellerne styres av atomfrekvensstandarder , som er preget av høy kortsiktig og langsiktig stabilitet. Rubidium og cesium-standarder, så vel som hydrogen masere komme i betraktning for en slik tidsbasis . Atomfrekvensstandardene definerer også stasjonstiden for å sette epoken og må deretter regelmessig sammenlignes med høyere tjenester på høyere nivå.
(e) prosesscomputer
En kraftig prosessdatamaskin og omfattende systemprogramvare er nødvendig for forhåndsberegning av innstillingsverdier, sporing av montering, systemovervåking, kalibrering og kontroll av systemparametere samt for forberedelse og kontroll av data.
f) flydetektor
I tettbygde områder og i nærheten av flyplasser er det noen ganger nødvendig med forholdsregler for å forhindre at et fly passeres gjennom av laserstrålen. For dette formålet kan et optisk system for flyplassering installeres, som automatisk slår av laseroperasjonen.
(g) Gate -tid og støyanalyse
Moderne SLR -teleskoper bruker den samme optikken for å sende og motta laseren. Bytting skjer med porttiden , den korte tidsperioden som det reflekterte signalet tidligst kan forventes. Det brukes også for å lette støyanalyse.
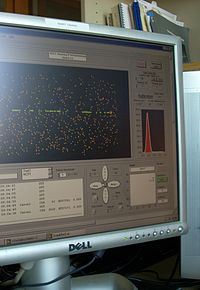
Det siste er avgjørende for observasjoner på dagtid , der tusen ganger flere fotoner kommer fra dagslys enn fra satellittekoet. Bildet til høyre viser et eksempel på støyanalysen , der programvaren til Wettzell -satellittstasjonen bare slipper gjennom fotonene fra mottaksstøyen som avviker fra porttiden med ikke mer enn 5 nanosekunder.
Satellitter med laserreflektorer

Laseravstandsmålinger kan bare utføres til satellitter som er utstyrt med passende laserreflektorer . Reflektorenes oppgave er å reflektere lyset tilbake i samme retning som det kommer fra. Slike reflektorer kalles også retroreflektorer .
For å oppnå ønsket målenøyaktighet må reflektorer utformes veldig nøye for hver satellittform og banehøyde. Reflektoren må være stor nok til å reflektere nok lys. For dette formålet kombineres vanligvis flere individuelle reflektorer med en diameter på 2–4 cm for å danne visse arrangementer (matriser). Det stilles svært høye krav til riktig gjensidig tildeling av de enkelte reflektorene for å holde pulsdeformasjoner på grunn av signaloverlapping så lav som mulig. I tillegg må lysbanen i reflektoren være kjent.
Siden retroreflektorer er passive systemer som relativt enkelt kan installeres som tilleggskomponenter på satellitter, er et stort antall romfartøy nå utstyrt med dem. De fleste satellitter utstyrt på denne måten handler om å bruke laseravstandsmålinger for å få presis baneinformasjon for de faktiske satellittoppdragene. Siden disse satellittene utfører andre oppgaver, kan reflektorene imidlertid ikke plasseres konsentrisk til massesenteret. Derfor må det etableres et klart forhold mellom den aktuelle reflektoren og satellittsenteret.
Med såkalte lasersatellitter er oppgaven med laseravstand i forgrunnen. For å gjøre dette må satellittbanen være veldig stabil. Derfor er lasersatellitter bygget med en kjerne av solid metall (noen ganger til og med spesielt tett materiale som uran ) slik at en satellitt i fotball som Starlette veier nesten 50 kg. Som et resultat lider den bare mindre orbitalforstyrrelser fra ikke -gravitasjonskrefter (høy atmosfære, lett trykk, solvind, etc.), og bane kan bestemmes nøyaktig - for eksempel for satellittriangulering eller for å beregne jordens gravitasjonsfelt .
Av de rundt 20 lasersatellittene som ble lansert siden 1970, er de viktigste:
- LAGEOS ( Laser Geodynamics Satellite , USA 1975), ca. 5.000 km høy polar bane , derfor en levetid på flere millioner år, diameter 60 cm, masse 411 kg (se bildet ovenfor)
- Starlette (Frankrike, 1975), sporhøyde for tiden ca. 900–1100 km, størrelse ≈20 cm, 50 kg
- LAGEOS 2 (Italia, 1992), identisk med den originale LAGEOS, ble lansert som en del av romfergen- oppdraget STS-52
- Stella (identisk med Starlette), ble lansert i 1993 med den europeiske Ariane -bæreraketten
- en bulgarsk satellitt (rundt 1985) og to japanske lasersatellitter.
Globalt SLR -nettverk
International Laser Ranging Service (forkortet ILRS) ble grunnlagt på 1990 -tallet for internasjonal koordinering av lasermålinger med satellitter. ILRS organiserer og koordinerer laseravstandsmålinger for å støtte globale geodetiske prosjekter og satellittoppdrag. Han utvikler også passende standarder og strategier for måling og analyse for å sikre en høy, konsistent kvalitet på dataene.
Målingene til SLR -stasjonene, som det finnes et par dusin over hele verden, kombineres beregningsmessig for å danne presise oppmålingsnettverk , hvorfra koordinater og jordens rotasjon i millimeterområdet kan utledes. De grunnleggende produkter av ILRS omfatter nøyaktige ephemeris (baner) av laser satellitter, koordinater og plate tektoniske endringer av observatories, variasjoner av den Geocenter og jordens gravitasjonsfelt , så vel som grunnleggende konstanter kraften, til jordens måne og månens bane .
Den såkalte Lunar Laser Ranging ( LLR ), dvs. avstandsmåling fra terrestriske stasjoner til månens overflate, brukes til å bestemme sistnevnte. Til dette formålet brukes noen laserreflektorer som ble plassert på månen under Apollo -oppdrag og de fra Sovjetunionen . For hver sterk laserpuls som sendes ut, mottas kun individuelle lyskvanta under disse målingene over to ganger måneavstanden (ca. 750 000 km), slik at metoden totalt sett er veldig kompleks. Målingene viste at radien til månens bane øker med rundt 40 mm hvert år.
Internasjonal jordrotasjonstjeneste
Siden alle laserobservatorier roterer rundt jordens akse på 23,9345 timer med jordens rotasjon , kan jordens romlige posisjon bestemmes nøyaktig ut fra målingene. En spesiell avdeling for IERS (International Earth Rotation Service) brukes til dette formålet.
Ovennevnte ILRS- tjeneste (ILRS: International Laser Ranging Service) gir IERS de målte SLR-dataene, som er redusert til en enhetlig modell. Dette beregner de tre viktigste jordrotasjonsparametrene (ERP) med korte intervaller, nemlig polkoordinatene x, y (skjæringspunktet for jordens (rotasjons) akse i Arktis) og verdens tidskorreksjon dUT1 (uregelmessighet i jordens rotasjon ).
Verdiparet (x, y) varierer lokalt i en spiral i rytmen i Chandler -perioden (ca. 430 dager, overlagt med en 365 -dagers periode), men forblir innenfor en 20 meters sirkel. Verdien av dUT1 endringer hovedsakelig monotont (alltid i én retning), og er årsaken til de såkalte spranget sekunder etter hvor universell tid UTC er justeres hvert 1-3 år den 31. desember eller 30. juni i jordens gjennomsnitts rotasjon.
Kombinasjon med relaterte prosesser
For å bygge bro over SLR -avhengigheten og øke nøyaktigheten, kombineres lasermålingene med andre metoder. Disse metodene er spesielle
- VLBI radiointerferometri til fjerne radiokilder (flere hundre nesten punktformede kvasarer )
- det globale posisjoneringssystemet (GPS) og de relaterte systemene GLONASS og i fremtiden Galileo ,
- DORIS Doppler radiosystem og
- mikrobølgeovnen PRARE , som er liten nok til å utstyre andre satellitter med den.
Disse forskjellige systemene danner en uavbrutt overvåking av jorden og kombineres til et nytt terrestrisk referansesystem med flere års mellomrom. Disse jordmodellene (se ITRS og ITRF 2000 ) har for tiden globale nøyaktigheter på noen få centimeter. Om noen år vil den neste globale modellen være enda mer presis enn ITRF 2005 .
I tillegg til geodesi , er alle disse grunnleggende systemene også grunnleggende for andre disipliner, spesielt for astronomi , fysikk og romfart .
Se også
- Bildefeil på målebjelken, tidsmåling , tidssignalsender
- Høyt mål , stjernetriangulering , pseudorangering , geoid- og banebestemmelse
Individuelle bevis
- ↑ Oversikt over Explorer -oppdragene (National Space Science Data Center of NASA)
weblenker
- Grunnleggende stasjoner i Wettzell (Bayern) og i Chile (meny = TIGO)
- swisstopo laserstasjon Zimmerwald og bilde av en lasersatellitt
- Internasjonal laseravstandstjeneste
- Lunar Laser Ranging-Den høy presisjon måling av månebevegelsen, TU München
litteratur
- Günter Seeber : Satellittgeodesi. Grunnleggende, metoder og applikasjoner. de Gruyter, Berlin et al. 1989, ISBN 3-11-010082-7 .
- Satellitt geodesi
- Satellittobservasjon
- Jordbasert romteknologi
- Laserapplikasjon
- Jordmåling